How do I create LS-Dyna analysis system using PyMechanical?
""".. _ref_example_07_lsdyna_taylor_bar_example: LS-Dyna analysis -------------------------- Using supplied files, this example shows how to insert an LS-Dyna analysis into a new Mechanical session and execute a sequence of Python scripting commands that define and solve the analysis. Deformation results are then reported and plastic strain (EPS) animation is exported in the project directory. """ ############################################################################### # Download required files # ~~~~~~~~~~~~~~~~~~~~~~~ # Download the required files. Print the file path for the geometry file. import os from ansys.mechanical.core import launch_mechanical from ansys.mechanical.core.examples import download_file geometry_path = download_file("example_08_Taylor_Bar.agdb", "pymechanical", "00_basic") print(f"Downloaded the geometry file to: {geometry_path}") ############################################################################### # Launch Mechanical # ~~~~~~~~~~~~~~~~~ # Launch a new Mechanical session in batch, setting ``cleanup_on_exit`` to # ``False``. To close this Mechanical session when finished, this example # must call the ``mechanical.exit()`` method. mechanical = launch_mechanical(batch=True, cleanup_on_exit=False) print(mechanical) ############################################################################### # Initialize variable for workflow # ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ # Set the ``part_file_path`` variable on the server for later use. # Make this variable compatible for Windows, Linux, and Docker containers. project_directory = mechanical.project_directory print(f"project directory = {project_directory}") project_directory = project_directory.replace("\\", "\\\\") mechanical.run_python_script(f"project_directory='{project_directory}'") # Upload the file to the project directory. mechanical.upload(file_name=geometry_path, file_location_destination=project_directory) # Build the path relative to project directory. base_name = os.path.basename(geometry_path) combined_path = os.path.join(project_directory, base_name) part_file_path = combined_path.replace("\\", "\\\\") mechanical.run_python_script(f"part_file_path='{part_file_path}'") ############################################################################### # Download required material files # ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ # Download the required file. Print the file path for the material file. mat_st_path = download_file("example_08_Taylor_Bar_Mat.xml", "pymechanical", "00_basic") print(f"Downloaded the material file to: {mat_st_path}") # Upload the file to the project directory. mechanical.upload(file_name=mat_st_path, file_location_destination=project_directory) # Build the path relative to project directory. base_name = os.path.basename(mat_st_path) combined_path = os.path.join(project_directory, base_name) mat_file_path = combined_path.replace("\\", "\\\\") mechanical.run_python_script(f"mat_file_path='{mat_file_path}'") # Verify the path result = mechanical.run_python_script("part_file_path") print(f"part_file_path on server: {result}") mech_act_code = """ import os import json # Import Taylor bar geometry geometry_import_group = Model.GeometryImportGroup geometry_import = geometry_import_group.AddGeometryImport() geometry_import_format = Ansys.Mechanical.DataModel.Enums.GeometryImportPreference.Format.Automatic geometry_import.Import(part_file_path, geometry_import_format, None) Model.AddLSDynaAnalysis() analysis = Model.Analyses[0] ExtAPI.Application.ActiveUnitSystem = MechanicalUnitSystem.StandardNMMton ExtAPI.Application.ActiveAngleUnit = AngleUnitType.Radian MAT = ExtAPI.DataModel.Project.Model.Materials MAT.Import(mat_file_path) # Assign the material ExtAPI.DataModel.Project.Model.Geometry.Children[0].Children[0].Material = "Bullet" # Add Coordinate system cs = Model.CoordinateSystems lcs = cs.AddCoordinateSystem() lcs.Origin = [10.0, 1.5, -10.0] lcs.PrimaryAxis = CoordinateSystemAxisType.PositiveZAxis lcs.PrimaryAxisDefineBy = CoordinateSystemAlignmentType.GlobalY lcs.OriginDefineBy = CoordinateSystemAlignmentType.Fixed solver = analysis.Solver solver.Properties['Step Controls/Endtime'].Value = 3.0E-5 analysis.Activate() # Add Rigid Wall rigid_wall = analysis.CreateLoadObject("Rigid Wall", "LSDYNA") rigid_wall.Properties["Coordinate System"].Value = lcs.ObjectId ExtAPI.DataModel.Tree.Refresh() # Adding initial velocity ic = ExtAPI.DataModel.GetObjectsByName("Initial Conditions")[0] vel = ic.InsertVelocity() selection = ExtAPI.SelectionManager.CreateSelectionInfo(SelectionTypeEnum.GeometryEntities) selection.Ids = [ExtAPI.DataModel.GeoData.Assemblies[0].Parts[0].Bodies[0].Id] vel.Location = selection vel.DefineBy = LoadDefineBy.Components vel.YComponent = Quantity(-280000, ExtAPI.DataModel.CurrentUnitFromQuantityName("Velocity")) # By default quadratic element order in Mechanical - LSDyna supports only Linear mesh = ExtAPI.DataModel.GetObjectsByName("Mesh")[0] mesh.ElementOrder = ElementOrder.Linear mesh.ElementSize = Quantity(0.5, "mm") # Solve analysis.Solution.Solve() # Post-processing eps = analysis.Solution.AddUserDefinedResult() eps.Expression = "EPS" eps.EvaluateAllResults() eps_max = eps.Maximum eps_min = eps.Minimum # Set Camera Graphics.Camera.FocalPoint = Point([9.0521184381880495, 2.9680547361873595, -11.52925245328758], 'mm') Graphics.Camera.ViewVector = Vector3D(0.5358281613965048, -0.45245539014067604, 0.71286204933850261) Graphics.Camera.UpVector = Vector3D(-0.59927496479653264, 0.39095266724498329, 0.69858823962485084) Graphics.Camera.SceneHeight = Quantity(14.66592829617538, 'mm') Graphics.Camera.SceneWidth = Quantity(8.4673776497126063, 'mm') # Set Scale factor true_scale = MechanicalEnums.Graphics.DeformationScaling.True Graphics.ViewOptions.ResultPreference.DeformationScaling = true_scale Graphics.ViewOptions.ResultPreference.DeformationScaleMultiplier = 1 # Export an animation anim_file_path = os.path.join(project_directory, "taylor_bar.avi") eps.ExportAnimation(anim_file_path, GraphicsAnimationExportFormat.AVI, Ansys.Mechanical.Graphics.AnimationExportSettings(2000.0, 1000.0)) dir_deformation_details = { "Minimum": str(eps_max), "Maximum": str(eps_min) } json.dumps(dir_deformation_details) """ output = mechanical.run_python_script(mech_act_code) print(output) ############################################################################### # Download output file from solve and print contents # ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ # Download the ``solve.out`` file from the server to the current working # directory and print the contents. Remove the ``solve.out`` file. def get_solve_out_path(mechanical): solve_out_path = "" for file_path in mechanical.list_files(): if file_path.find("solve.out") != -1: solve_out_path = file_path break return solve_out_path def write_file_contents_to_console(path): with open(path, "rt") as file: for line in file: print(line, end="") solve_out_path = get_solve_out_path(mechanical) if solve_out_path != "": current_working_directory = os.getcwd() local_file_path_list = mechanical.download( solve_out_path, target_dir=current_working_directory ) solve_out_local_path = local_file_path_list[0] print(f"Local solve.out path : {solve_out_local_path}") write_file_contents_to_console(solve_out_local_path) os.remove(solve_out_local_path) ########################################################### # Close Mechanical # ~~~~~~~~~~~~~~~~ # Close the Mechanical instance. mechanical.exit()
Hi, Ayush Kumar,
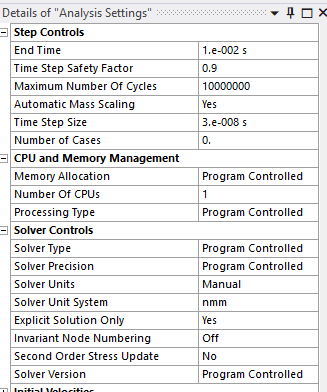
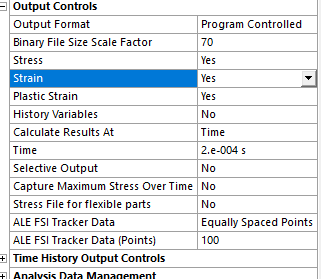
It is a very useful reference for me, appreciated. But I have some troubles to script other analysis setting(Automatic Mass Scaling, Time Step Size, Hourglass Type, some Output Controls) in LS-Dyna system using PyMechanical. What is the API of them or how do I get the API information?